Project Caelus is a non-profit rocketry organization I helped start in high school.
The team aims to be the first high school rocketry team to develop a liquid-fueled rocket engine and
launch it to the edge of space (100km above the Earth’s surface). Over my three-year tenure with the team,
I helped develop the engine test stand, a testing platform that allowed us to validate our engine design,
flight software, and electrical systems.
In particular, as the head of the Avionics sub-team, I led a team of four to develop an avionics
system that could support the processing needs of our flight software; make accurate pressure, temperature,
and fuel measurements; and automatically toggle various solenoid valves to control the fuel/oxidizer outputs
to the engine. The system also needed to be able to allow human operators to manually override the flight
software and abort from a safe distance.
Design Overview
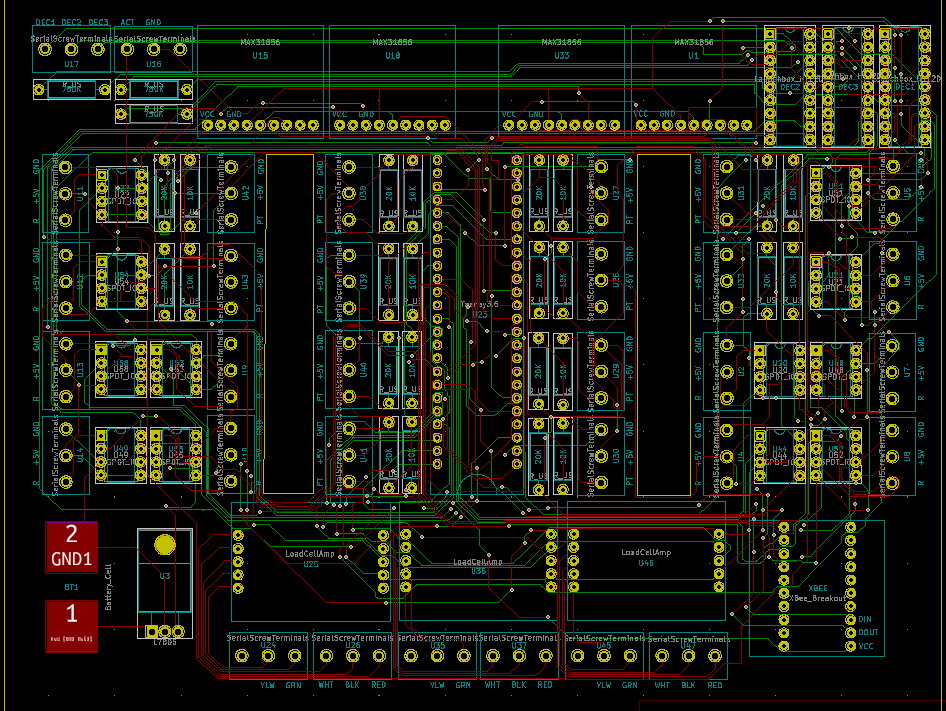
At the heart of the system is a two-layer copper PCB that hosts a Teensy 3.6 flight computer running
C++ flight software. The system can simultaneously:
Take measurements from:
12 Pressure Transducers
5 Thermocouples (temperature sensors)
3 Load Cells (force/weight sensors)
Actuate up to 12 solenoid valves
Transmit all sensor measurements / valve states / additional telemetry to ground station
Provide hardware override for ground station operators in need of abort
With the onboard batteries, the system could be powered continuously for up to three hours, which was necessary for
long-duration tests. All parts were conformal coated, protecting them from dust, moisture, and extreme temperatures.
Design Process
After getting design requirements and constraints from the Propulsion team, the Avionics team got to work
designing the system in KiCAD, a PCB-designer software.
Pressure Transducers (PTs)
Each PT provides three wires: Red (5V+), Black (GND), and Green (Signal). The sensor outputs a 5V signal that needs to be
attenuated to a 3.3V signal for our Teensy 3.6 microcontroller. To achieve this, every signal input is routed through a
voltage divider that cuts the signal by a third. Due to high power losses across the resistors, future iterations will
utilize Inverting Op-Amps with a fractional gain to achieve the attenuated signal.
Thermocouples
Each K-type, ungrounded thermocouple requires an amplifier to make the millivolt output readable by the Teensy 3.6 flight
computer. For this, we chose the Adafruit MAX31856 amplifier due to its compatibility, reliability, and affordability.
The MAX31856 communicates with the FC via the SPI serial protocol.
Load Cells
Load cells are essentially electronic strain gauges, so they can be used to measure the weight of our tanks and the thrust
generated by our engine. Similar to the thermocouples, each load cell outputs a millivolt signal which needs to be amplified
for the FC. For this, we use the SparkFun HX711 amplifier which communicates with the FC via serial communication.
Data Transmission
All sensor measurements, valve states, and flight software variables are transmitted to the ground station via an Xbee radio.
Data packets are sent 10 times a second, allowing for ground station operators to get a comprehensive view of the state of
the entire system at any moment.
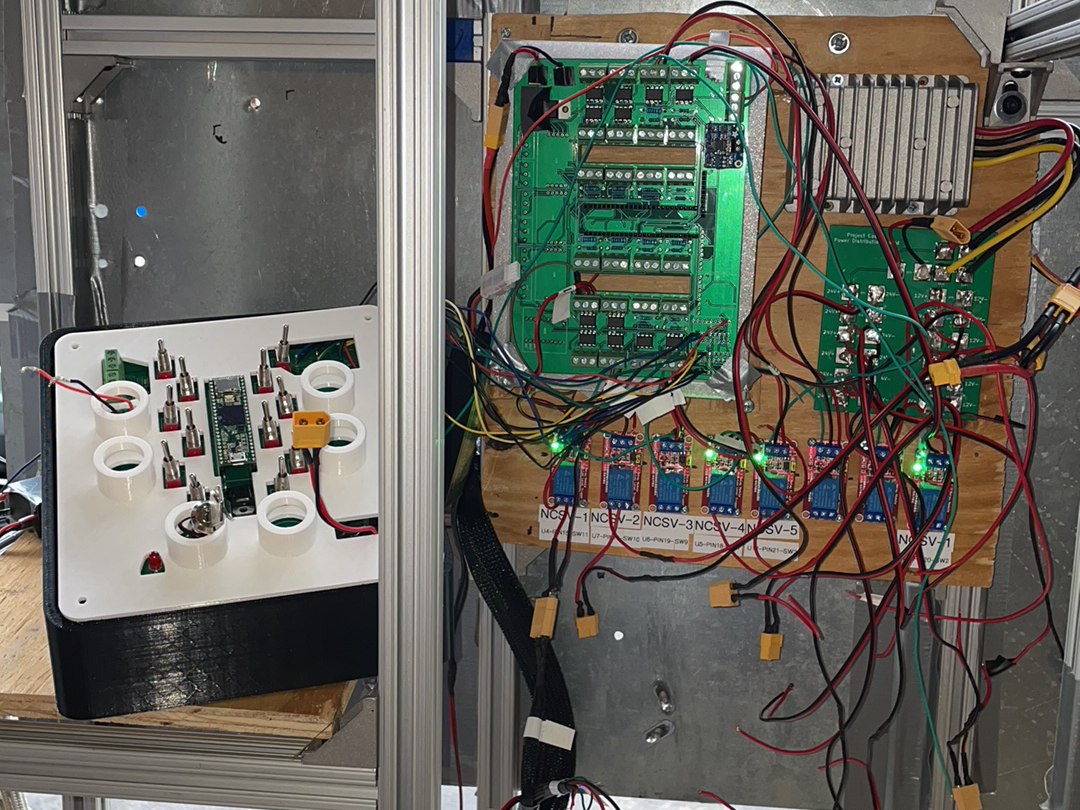
Solenoid Actuation
Solenoid valves are relatively simple devices – internally, they contain a coil of wire attached to a plunger that opens and closes
the valve when a current is applied. The Teensy 3.6 cannot supply enough current to actuate these valves; thus, the FC controlled
Arduino Relays, which supplied power from our 6S Lipos to open/close the valves. In future iteratios, the Arduino Relays will be replaced
by power transistors which consume less power during operation.
However, to allow for groundstation override capabilities via the Launchbox
(explained later), each relay needs to be connected to both the FC and the groundstation. To achieve this, every relay signal line was
attached to a DG419 IC (essentially an electronic switch) that allows the relay to be controlled by both input sources. When the Launchbox
is enabled, the enable pin for each DG419 is toggled HIGH, thereby connecting each relay to the groundstation and allowing for manual
override.
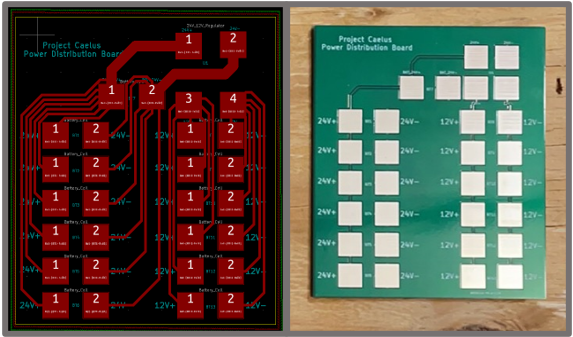
Power Distribution Board
As mentioned in the Solenoid Actuation section, every solenoid valve needs to be powered via an external battery source (in our case,
a 6S lipo). The Power Distribution Board (PDB) provides multiple 24V and 12V terminals to power the various solenoids on the test stand.
The board is powered via a 6S Lipo (24V battery) that runs through an external step-down converter to power the 12V terminals. Future
iterations of the board will include built-in XT-60 connectors instead of solder pads to allow for better wiring organization and easier
connections.